Исследователи из Японии впервые продемонстрировали гипотезу спинального моторного модуля в руке приматов, открыв новый путь для восстановления после болезни или травмы.
Человеческая рука имеет 27 мышц и 18 суставов, которые наша нервная система способна координировать для сложных движений. Однако количество комбинаций—или степеней свободы—настолько велико, что искусственное воспроизведение этого контроля и регулирования мышечной активности в реальном времени требует даже современного суперкомпьютера. Хотя метод, используемый центральной нервной системой для уменьшения этой сложности, все еще изучается, гипотеза моторного модуля является одной из возможных.
Согласно гипотезе моторного модуля, мозг рекрутирует интернейронные модули в спинном мозге, а не отдельные мышцы, чтобы создать движение, в котором различные модули могут быть объединены для создания конкретных движений. Почти 40 лет назад исследования на лягушках показали, что одновременный набор двух модулей нейронов, управляющих мышцами ног, создает один и тот же паттерн двигательной активности, представляющий собой "линейное суммирование" двух компонентных паттернов.
Международная группа исследователей, возглавляемая Кадзухико Секи из Национального центра неврологии и психиатрии при отделении Нейрофизиологии, в сотрудничестве с Дэвидом Ковальски из Университета Дрекселя и Томохико Такеи из Центра перспективных исследований Университета Киото хакуби, попыталась определить, присутствует ли этот метод моторного контроля также в спинном мозге приматов. Если она будет подтверждена, это даст новое понимание важности спинальных интернейронов в двигательной активности и приведет к новым идеям в лечении двигательных расстройств и, возможно, даже к методу "реанимации" конечности после травмы позвоночника.
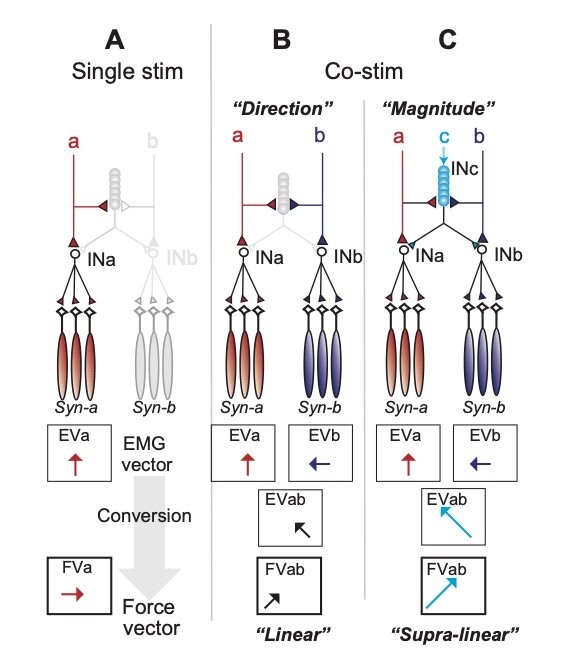
Команда имплантировала небольшой набор электродов в шейный отдел спинного мозга у трех макак. Под наркозом различные группы интернейронов набирались индивидуально с помощью метода, называемого интраспинальной микростимуляцией, или ISMS. Команда обнаружила, что, как и в случае с лягушачьей лапкой, направление силы руки на запястье во время двухплощадочного моделирования было равно линейному суммированию индивидуально набранных выходов. Однако, в отличие от лягушачьей лапки, выходная величина силы может быть во много раз выше, чем ожидалось от простого линейного суммирования отдельных выходов. Когда команда исследовала мышечную активность, они обнаружили, что это супралинейное суммирование было в большинстве мышц, особенно в локте, запястье и пальце.
"Это очень интересное открытие по двум причинам", - объясняет Секи. - Во-первых, он демонстрирует особую особенность спинного мозга приматов, связанную с повышенным разнообразием движений пальцев. Во-вторых, теперь у нас есть прямые доказательства того, что приматы могут использовать моторные модули в спинном мозге для эффективного и независимого управления направлением движения рук и величиной силы."
Фактически, использование парной стимуляции в спинном мозге приматов не только непосредственно активирует две группы интернейронов, INa и INb, которые рекрутируют свои целевые мышечные синергии, Syn-a и Syn-b, чтобы установить траекторию движения руки, но также может активировать третий набор интернейронов, которые могут адаптировать двигательную активность на спинном уровне для изменения силы движения, group INc. Это позволит мозгу планировать путь, который должна пройти рука, в то время как спинной мозг адаптирует мышечную активность, чтобы убедиться, что этот путь произойдет.
Одним из примеров такого подхода "планируй и приспосабливайся" к управлению моторикой является обманчиво простой акт питья из банки содовой. Мозг может предопределить лучший способ поднять банку ко рту для глотка, но фактическое количество соды в банке—и, следовательно, вес банки—возможно, неизвестны. После того, как ваш мозг определил траекторию, которую должна принять банка—в данном случае INa и INb—количество силы, необходимое для завершения этого действия, может быть модулировано отдельно в INc, а не переопределять, какие наборы мышц будут необходимы.
Это исследование впервые экспериментально доказывает, что движения рук приматов могут эффективно контролироваться двигательными модулями, присутствующими в спинном мозге. Основываясь на результатах этого исследования, ожидается, что анализ и интерпретация движений конечностей человека на основе гипотезы двигательного модуля будут развиваться и в дальнейшем.
В области робототехники эта теория управления может привести к более эффективным методам создания сложных движений конечностей, в то время как в области клинической медицины ожидается, что новые диагностические и терапевтические методы будут созданы путем анализа двигательных нарушений, вызванных нейродегенеративными заболеваниями и инсультами. | |
| Просмотров: 424 | |