Предсказание того, когда и как коллекции частиц, роботов или животных становятся упорядоченными, остается сложной задачей в науке и технике. В 19 веке ученые и инженеры разработали дисциплину статистической механики, которая предсказывает, как группы простых частиц переходят от порядка к беспорядку, например, когда набор случайно сталкивающихся атомов замерзает, образуя однородную кристаллическую решетку.
Сложнее предсказать коллективное поведение, которое может быть достигнуто, когда частицы становятся более сложными, так что они могут двигаться самостоятельно. Этот тип системы-наблюдаемый в птичьих стаях, бактериальных колониях и роях роботов-носит название "активная материя".
Как сообщалось в номере журнала Science от 1 января 2021 года, команда физиков и инженеров предложила новый принцип, согласно которому системы активной материи могут самопроизвольно упорядочиваться, не нуждаясь в инструкциях более высокого уровня или даже программируемом взаимодействии между агентами. И они продемонстрировали этот принцип в различных системах, включая группы периодически меняющих форму роботов, называемых "умными частицами" - умными, активными частицами.
Теория, разработанная доктором Павлом Чвыковым в Массачусетском технологическом институте в то время, когда он был студентом проф. Джереми Ингленд, который в настоящее время является исследователем в Школе физики технологического института Джорджии, утверждает, что некоторые типы активной материи с достаточно беспорядочной динамикой спонтанно обнаружат то, что исследователи называют "низко дребезжащими" состояниями.
"Дребезжание-это когда материя принимает энергию, текущую в нее, и превращает ее в случайное движение", - сказал Англия. "Дребезжание может быть больше, когда движение более сильное или более случайное. И наоборот, низкий грохот либо очень слаб, либо высокоорганизован—или и то, и другое. Итак, идея состоит в том, что если ваш источник материи и энергии допускает возможность низкого состояния дребезжания, система будет беспорядочно перестраиваться, пока не найдет это состояние, а затем застрянет там. Если вы снабжаете энергию через силы определенным паттерном, это означает, что выбранное состояние обнаружит способ движения материи, точно соответствующий этому паттерну."
Для развития своей теории Англия и Чвыков черпали вдохновение в явлении, получившем название "дубляж", открытом швейцарским физиком Шарлем соре в конце XIX века. В экспериментах Соре он обнаружил, что воздействие первоначально однородного раствора соли в трубке на разность температур самопроизвольно приводит к увеличению концентрации соли в более холодной области, что соответствует увеличению порядка раствора.
Чвыков и Англия разработали многочисленные математические модели, чтобы продемонстрировать принцип низкого грохота, но только после того, как они связались с Дэниелом Голдманом, профессором физики семьи Данн в Технологическом институте Джорджии, они смогли проверить свои предсказания.
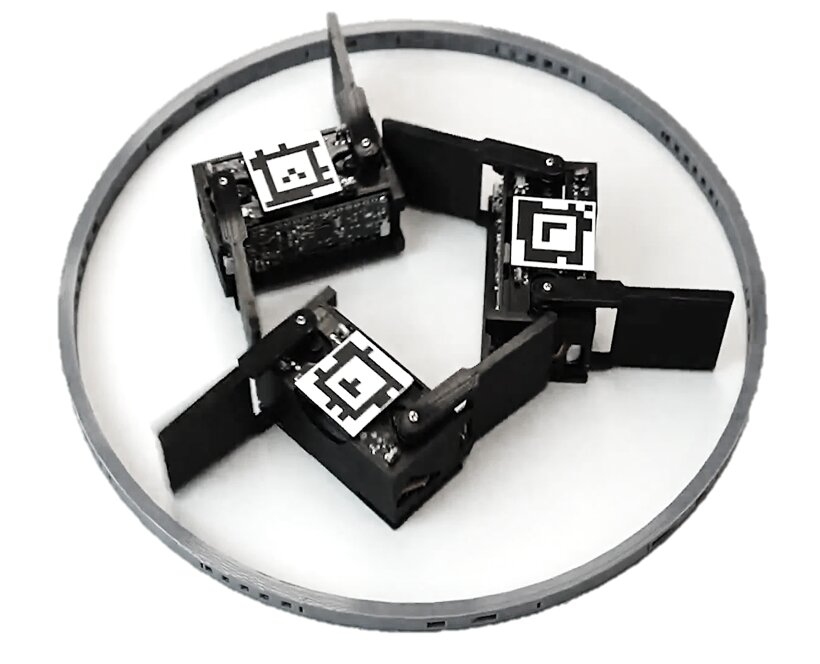
Голдман сказал: "несколько лет назад я видел, как Англия проводила семинар, и подумал, что некоторые из наших умных роботов могут оказаться полезными для проверки этой теории." Работая с Чвыковым, посетившим лабораторию Голдмана, аспиранты Уильям Савойе и Акаш Вардхан использовали три хлопающих смартикулы, заключенные в кольцо, чтобы сравнить эксперименты с теорией. Студенты заметили, что вместо того, чтобы демонстрировать сложную динамику и полностью исследовать контейнер, роботы спонтанно самоорганизуются в несколько танцев-например, один танец состоит из трех роботов, последовательно хлопающих друг друга по рукам. Эти танцы могли сохраняться на протяжении сотен взмахов крыльев, но внезапно теряли устойчивость и сменялись танцем другого образца.
После того, как Чвыков впервые продемонстрировал, что эти простые танцы на самом деле были низкими дребезжащими состояниями, он работал с инженерами Северо-Западного университета, проф. Тодд Мерфи и аспирант Томас Берруэта, которые разработали более утонченные и лучше управляемые умные устройства. Усовершенствованные умники позволили исследователям проверить пределы теории, включая то, как типы и количество танцев варьировались для различных моделей взмахов руками, а также как эти танцы можно было контролировать. "Управляя последовательностями низких дребезжащих состояний, мы смогли заставить систему достигать конфигураций, которые делают полезную работу", - сказал Берруэта. Исследователи Северо-Западного университета говорят, что эти результаты могут иметь широкие практические последствия для микророботических Роев, активного вещества и метаматериалов.
Как отметил Ингленд: "для Роев роботов речь идет о том, чтобы получить множество адаптивных и умных групповых моделей поведения, которые вы можете спроектировать для реализации в одном рое, даже если отдельные роботы относительно дешевы и вычислительно просты. Для живых клеток и новых материалов это может быть понимание того, что может дать вам " Рой " атомов или белков, а также новых материалов или вычислительных свойств." | |
| Просмотров: 386 | |