Последние достижения в области робототехники позволили создавать все более сложные роботизированные конечности и экзоскелеты. Роботизированные экзоскелеты-это, по сути, носимые "оболочки", изготовленные из различных частей роботов. Экзоскелеты могут улучшить силу, возможности и стабильность пользователей, помогая им решать тяжелые физические задачи с меньшими усилиями или помогая их реабилитации после несчастных случаев.
До сих пор большинство экзоскелетов были созданы с использованием модели, основанной на вращающемся шарнире с фиксированной осью. Хотя эта модель проста и достаточно эффективна, она не отражает способ вращения суставов человека (то есть полицентрично), который может ухудшить или ограничить движения тех, кто их носит.
Таким образом, в последние годы робототехники изучают потенциал альтернативных моделей для изготовления экзоскелетов. Один из таких методов предполагает использование Н-бар связей присоединиться к конечности компонентов. При тщательной реализации эти связи могут эффективно воспроизводить конкретные движения человека, поскольку они не представляют собой несоответствий, связанных с моноцентрическими неподвижными осями вращающихся шарниров.
В то время как n-стержневые связи оказались очень перспективными инструментами для воспроизведения движения суставов человека, их чрезмерное использование может привести к рыхлым и нестабильным экзоскелетным структурам. Это отсутствие стабильности делает полученный экзоскелет непригодным для реабилитации пациентов с поврежденными или парализованными конечностями.
Исследователи из Сианьского университета Цзяотун в Китае недавно представили новую совместную модель, которая могла бы позволить разработать более стабильные и надежные экзоскелеты. Их модель, представленная в статье, опубликованной в IEEE Access, вдохновлена членистоногими, классом беспозвоночных животных, характеризующихся биологическими экзоскелетами, сегментированными телами и парными суставчатыми придатками. Примерами известных членистоногих являются насекомые (например, кузнечики, муравьи, пчелы и стрекозы), паукообразные (например, пауки и скорпионы), мириаподы (например, многоножки и многоножки) и ракообразные (например, крабы, омары и креветки).
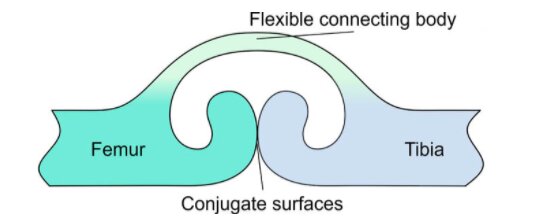
"Распространенный способ реализовать бионическое движение-это использовать n-образный рычажный механизм внутри подшипников, но результирующие соединения могут стать сложными", - пишут исследователи в своей статье. "Здесь мы предлагаем модель сустава, основанную на анатомии суставов кузнечика, которая состоит из пары сопряженных поверхностей и гибкого соединительного тела."
Модель, разработанная исследователями, вдохновлена механизмами, лежащими в основе движений кузнечиков. Простой анатомический эксперимент, однако, показал, что он также эффективно воспроизводит способ, которым крабы и омары двигают своими конечностями, что предполагает, что он отражает физическую структуру большинства членистоногих.
В рамках своего исследования исследователи использовали свою модель для создания прототипа сустава для экзоскелетов. Они спроектировали это соединение, используя разработанный ими алгоритм оптимизации.
Впоследствии они оценили свой прототип шарнира в серии экспериментов, чтобы проверить его работоспособность и кинематические характеристики. Результаты, полученные в ходе этих экспериментов, подтвердили целесообразность их модели для создания бионических робототехнических систем и ее выгодные характеристики.
В будущем созданная этой группой исследователей совместная модель, вдохновленная членистоногими, может быть использована для создания более эффективных экзоскелетов или других роботизированных конструкций для различных применений, включая реабилитацию или расширение человеческих возможностей. В отличие от других стратегий проектирования экзоскелетов, он может позволить людям двигаться более свободно и естественно, а также обеспечить адекватную поддержку их тела. | |
| Просмотров: 365 | |