Резервуарные вычисления-это весьма перспективная вычислительная система, основанная на искусственных рекуррентных нейронных сетях (РННС). За последние несколько лет эта система была успешно применена к различным задачам, начиная от прогнозирования временных рядов (например, фондового рынка или прогноза погоды) и заканчивая роботизированным планированием движения и распознаванием речи.
Исследователи из Университета Клемсона недавно попытались объединить физические методы вычисления резервуаров с конструкциями оригами с целью обеспечения более продвинутых возможностей ползания роботов. Созданная ими новая структура, представленная в статье, предварительно опубликованной в arXiv, может открыть новые, захватывающие возможности для разработки сложных систем мягкой робототехники.
"Наши исследования в рамках Группы Dynamic Matter Group в Университете Клемсона сосредоточены на понимании и использовании уникальных механических свойств динамических метаструктур и механизмов, таких как оригами, совместимые механизмы и композитные ламинаты",-сказала Приянка Бховад, одна из исследователей, проводивших это исследование, в интервью Tech Xplore. "Мои исследования включают использование оригами и совместимых механизмов для создания" механически интеллектуальных мягких роботов " —более конкретно, использование морфологии самого робота для задач управления и вычислений."
При разработке своей структуры Бховад и ее доктор философии Суйи Ли черпали вдохновение из структур тела животных. Более конкретно, они попытались воспроизвести способы, которыми животные используют сильно взаимосвязанные сети нервов и мышц, а также то, как эти сети обмениваются информацией, которую они собирают с мозгом.
"Морфология тела животного является неотъемлемой частью его возбуждения, контроля и, в конечном счете, процесса принятия решений его мозгом",-объяснил Бховад. "Это приводит к гораздо большей эффективности, чем наши спроектированные мягкие роботы с точки зрения реагирования и адаптации к неструктурированной динамической среде."
Структура исследователей предполагает, что роботизированные системы могут содержать сети датчиков и исполнительных механизмов, распределенных по всему их" скелету", точно так же, как тела животных содержат сложные сети нервов и мышц. Чтобы искусственно воспроизвести эти биологические сети, команда использовала физические методы вычисления резервуаров и конструкции, вдохновленные японским искусством складывания бумаги оригами.
"Оригами обладает нелинейной динамикой складывания, которая необходима для физического резервуара", - сказал Бховад. "Он также по своей сути уступчив и поэтому идеально подходит для проектирования мягких роботизированных скелетов. Из плоского листа материала легко изготовить сложные трехмерные механизмы, а принципы дизайна оригами применимы и к различным масштабам длины. Благодаря всем этим преимуществам мы исследовали использование оригами в качестве физического резервуара и показали, как мы можем использовать его вычислительную мощность для генерации роботизированной локомоции."
В начале 2000-х годов компьютерщики начали искать эффективные и простые стратегии обучения RNN, которые не предполагали обратного распространения (известный подход к обучению алгоритмов машинного обучения). Это вдохновило идею использования "фиксированного" типа РНН, который теперь называется "резервуаром"."
Группа исследователей из Бременского университета Якобса (Герберт Ягер и его коллеги) представила класс алгоритмов, которые они назвали echo state networks (ESNs), в то время как другие ученые из Грацского технологического университета (Вольфганг Маас и его коллеги) разработали то, что они называют жидкостными автоматами (LSM). Впоследствии эти два понятия, ESNs и LSMs, были объединены под общим термином reservoir computing (RC).
"В физическом резервуарном вычислении "фиксированная" динамическая система (ака. "резервуар") используется", - сказал Бховад. "Исследователи ранее показали, что в качестве динамических физических резервуаров и роботизированных скелетов можно использовать общую нелинейную сеть масс-пружин, мягкие роботизированные руки осьминога и структуры тенсегрити. Узлы резервуара имеют фиксированные взаимосвязи и входные веса, и только линейные выходные веса считывания обучаются простыми методами, такими как линейная или гребневая регрессия."
Резервуар, предложенный Бховадом и ее Ли, по существу, состоит из сети датчиков и исполнительных механизмов, распределенных по складкам структур на основе оригами. Используя эти датчики и приводы, исследователи смогли измерить, как складывается и разворачивается структура оригами в ответ на внешние раздражители.
"Динамика резервуаров преобразует поток входных данных в пространство высокомерных состояний, захватывая его нелинейности и зависящую от времени информацию для вычислительных задач", - сказал Бховад. "В результате мы упрощаем центральный контроллер, используя его для расчета только выходных данных с использованием линейных весов считывания."
Подход, разработанный Бховадом и Ли, может автономно генерировать оптимальные управляющие сигналы, просто подавая выходной ток обратно в резервуар. Это в конечном счете позволяет ему отклонять помехи и быстро реагировать на изменения входных стимулов путем модуляции выходных сигналов.
"Мы использовали резервуар оригами для эмуляции нескольких нелинейных фильтров одновременно, выполнения генерации паттернов и модуляции выходов, все из которых имеют отношение к роботизированным приложениям", - сказал Бховад. "Например, задачи генерации паттернов, такие как периодическая генерация траекторий, важны для передвижения роботов. Задачи модуляции гарантируют, что робот может реагировать на изменение внешних входов, скажем, изменяя траекторию."
Бховад и Ли оценили эффективность своей системы, проведя обширное численное моделирование. Они обнаружили, что их техника может выполнять вычислительные задачи даже без измерения отклика всех складок оригами. Таким образом, исследователи выбрали подмножество складок, датчиков и исполнительных механизмов для фокусировки, что позволило снизить сложность сети резервуарной системы оригами без ущерба для ее общей производительности.
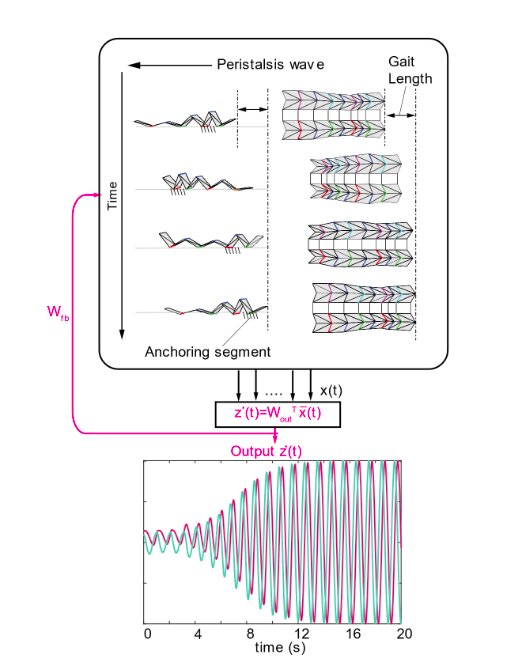
Фреймворк может автономно генерировать глобальное целевое поведение для роботизированных систем вместо того, чтобы планировать и контролировать движение различных компонентов по отдельности. В своем исследовании Бховад и ее коллеги показали, как его можно использовать для планирования передвижения перистальтического ползающего робота, вдохновленного дождевыми червями.
"Мы показываем, что нелинейная динамика складывания оригами обладает значительной вычислительной мощностью", - сказал Бховад. "Мы проводим обширное численное моделирование, чтобы раскрыть связь между дизайном оригами и его вычислительной мощностью, обеспечивая руководство для оптимизации вычислительной производительности. Наконец, мы демонстрируем, как непосредственно встроить резервуарные вычисления в роботизированное тело оригами, чтобы генерировать перистальтику, подобную дождевому червю, ползущему без использования каких-либо традиционных контроллеров."
Инновационная вычислительная система резервуара, разработанная этой командой исследователей, вскоре может быть использована для создания новых мягких роботов на основе оригами, которые используют простую мехатронику, взаимодействуют с окружающей средой через сети распределенных датчиков и исполнительных механизмов и реагируют на внешние возмущения, модулируя свою деятельность или поведение. Чтобы эти роботы могли эффективно и автономно работать в неструктурированной, неизвестной и динамичной среде, их "тела" и "мозги" должны работать вместе, непрерывно обмениваясь информацией, собранной сенсорно-исполнительными сетями, и используя ее для выполнения низкоуровневых задач управления (например, планирования движений и траекторий робота). Подход, предложенный Бховад и ее коллегами, может стать важным шагом на пути к достижению этой цели.
В настоящее время исследователи пытаются экспериментально реализовать свой вдохновленный оригами подход к вычислению резервуаров, чтобы еще больше подтвердить его эффективность. Кроме того, они хотели бы определить способы точного моделирования физических сил, влияющих на движения робота (например, трение, реакции на различные типы местности и т. Д.), чтобы включить эту информацию в свои прогнозы и еще больше улучшить его производительность.
"В будущем мы хотим соединить вычислительную структуру резервуара с уникальными механическими свойствами, которые может предложить оригами", - сказал Бховад. "Например, механизмы оригами могут демонстрировать мультитрансформируемость, мультистабильность, нелинейную жесткость и отрицательный коэффициент Пуассона. Сочетание этих двух подходов откроет новые возможности в разработке следующего поколения мягких роботов со встроенным механическим интеллектом." | |
| Просмотров: 654 | |